项目简介
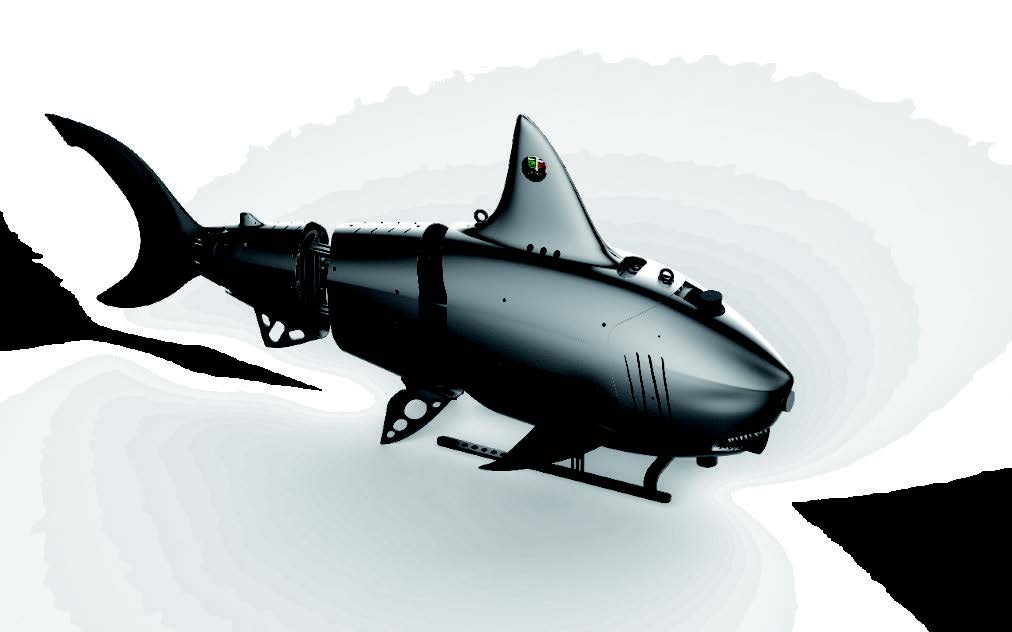
本项目产业化的市场定位为需要长时间、远航程可进行水下目标侦测及定位的单位。Robo Shark智能仿生深海潜航器采用鲨鱼为原型,以三关节仿生尾鳍取代无刷推进器,有效降低设备运行噪声的同时节省了能量消耗。设备外壳采用吸音材料制成,可以提高设备的隐蔽性。通过重力舱吸排水实现设备的上浮下潜,控制更为灵活,具有定点悬停、定深巡游等多种智能运动功能,最大下潜深度可达1000 m。
此潜航器的主要特点:
1.节能高效:采用仿生+滑翔作为动力源,利用反卡门涡街的驱动原理,仿生推进效率高达80%;
2.隐蔽环保:模拟鲨鱼的外形与游动方式,隐蔽性强,对环境扰动小,不会伤害水下生物;
3.安全可靠:采用整体开放,局部密封的设计, 配备六方向避障传感器,具有低电量返航、失联返航等功能;
4.载荷扩展:可搭载声、光、电、磁传感器,满足水下通信、水下定位和水下探测等需求。
应用范围
Robo Shark具有长续航、低噪音的优势,适合用于长时间的水下巡游、水下追踪等任务。可完成海洋勘探,包括海洋科考、水质监测、地貌测绘等任务;水下作业,包括海底管道检测、水下打捞、大坝巡检等任务;军事上可应用于目标侦查、搜寻、定位及排爆等复杂任务。Robo Shark多关节仿生机器鱼根据应用场景和使用需求,除高精度GPS、深度计、九轴姿态传感器以及远距离射频通信等标准模块外,还可以搭载声呐设备、水声通讯设备,进一步的丰富产品功能。
项目阶段
本项目已经做出工程机,可根据实际需求进行定制化开发。主要性能参数如下:
1.续航能力:15天(滑翔推进)/8小时(尾鳍推进)
2.最大下潜深度:1000m
3.导航:GPS、惯性导航
4.通信距离:开阔水域可达3km(可选配卫通模块)
5.最大巡游速度:1.5m/s,五级速度可调
6.最大负载能力:25kg
知识产权
已申请相关专利。
合作方式
技术服务。
联系方式
电子信箱:kjkfb@pku.edu.cn



